2.3.5 Correction de relief
Définition
On a vu dans la section sur la correction de plateau qu’il faut corriger les données gravimétriques pour des variations d’élévation en considérant des tranches de terrain d’épaisseur $h$. Dans les terrains très accidentés, on ne peut pas utiliser de telles tranches pour approximer le terrain. Il faut intégrer numériquement les parties qui dépassent (montagnes) et qui manquent (vallées) à la tranche de Bouguer.
Au point $P$ sur la Figure 1, la gravité verticale $\Delta g_z$ causée par un morceau de volume $\mathrm{d}V$ représenté par les coordonnées ($\xi, \eta, \zeta$) est donnée par
\[\Delta g_z = G \Delta\rho \int_V \frac{\Delta z}{(\Delta x^2+\Delta y^2+\Delta z^2)^{3/2}}\,\mathrm{d}V ,\]où $G$ est la constante gravitationnelle et avec les substitutions suivantes :
- $\Delta x = x - \xi$,
- $\Delta y = y - \eta$,
- $\Delta z = z - \zeta$,
- $\mathrm{d}V = \mathrm{d}\xi\,\mathrm{d}\eta\,\mathrm{d}\zeta$.
$\Delta g_z$ est toujours négatif parce que $\Delta z$ et $\Delta\rho$ auront toujours un signe contraire pour les morceaux manquant et les morceaux en trop. Il faut donc toujours additionner la correction de relief.
De façon plus intuitive, considérons un volume de roche au-dessus de la station de mesure (une colline). Ce volume génère une attraction vers le haut, car il a une densité positive. Cette attraction est de sens contraire à l’attraction terrestre et le volume a pour effet de réduire $g_z$. Il faut additionner le terme de correction pour éliminer l’effet de la colline. Pour une vallée en dessous de la station, l’effet est aussi de réduire $g_z$ parce que le manque de masse crée un contraste de densité négatif. Il faut dans ce cas aussi additionner le terme de correction pour compenser l’effet de la vallée.
Il existe plusieurs techniques pour appliquer la correction de relief dont certaines utilisent des abaques et des tableaux qui permettent d’approximer la correction de relief au moment des mesures sur le terrain. Aujourd’hui ces méthodes sont désuètes parce qu’on a accès à des instruments GPS très précis et des ordinateurs capables de traiter les données massives. On utilise plutôt des programmes informatiques et des modèles numériques de terrain pour calculer la correction de relief sur l’ensemble du site étudié.

Figure 1. Schéma montrant une station gravimétrique $P$ sur un flanc de colline. Les volumes de masses en trop et en manque sont identifiés.
Méthode numérique
Modèles numériques de terrain
Les modèles numériques de terrain (MNT) sont des représentations de la topographie d’une zone d’intérêt. Les MNT ne tiennent compte que des variations dans la topographie. Les modèles numériques d’élévation (MNE) quant-à eux tiennent compte des édifices et du sommet des arbres (Figure 3). Les MNT sont appropriés pour corriger les données gravimétriques à des fins d’applications géologiques. Pour des applications en génie civil l’utilisation d’un MNE pourrait être justifiée.

Figure 2. Schéma montrant la différence entre un MNT et un MNE. Source.
{kind=link}
Les MNT et MNE sont le plus souvent distribués sous forme de rasters géoréférencés. Un format bien connu pour ce type de données est le format GeoTIFF ou .tif. Un fichier GeoTIFF est une image qui peut contenir plusieurs canaux d’informations et qui est accompagnée de métadonnées incluant la transformation et le système de coordonnées de référence. Les métadonnées permettent de géolocaliser chaque pixel de l’image. QGIS est un logiciel gratuit qui permet de traiter et mettre en carte ce type de données. La Figure 3 montre un exemple de MNT du parc national du Grand Cayon.
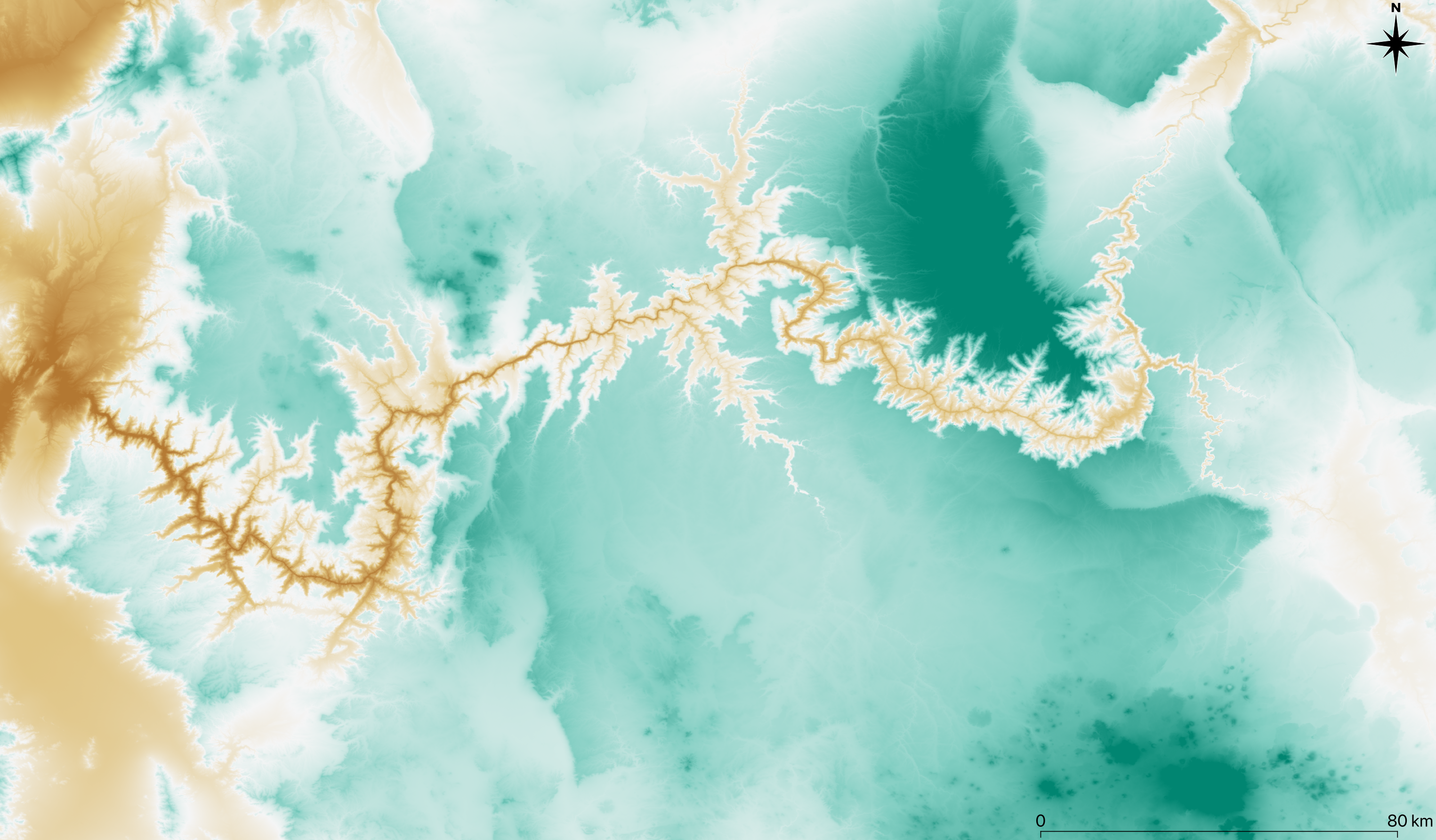
Figure 3. Modèle numérique de terrain du parc national du Grand Cayon, Arizona USA. Fait par moi avec les données du Shuttle Radar Topography Mission et Earth Engine. Télécharger le GeoTIFF (96 MB) pour l’ouvrir dans QGIS.
Calcul de la correction
On peut simplifier le problème de la correction de relief en supposant qu’à grande échelle, les volumes en trop et en moins peuvent être discrétisés en faisant l’approximation qu’ils sont un ensemble de tiges minces verticales tel que montré à la Figure 4. Il faut comprendre que ce concept s’applique en 3D pour tenir compte des variations de relief dans toutes les directions. Chaque tige est caractérisée par une section d’aire $S$ et une hauteur $\Delta z_i$ par rapport à la station $P$, tel que son volume est $V_i = \Delta z_i S$.

Figure 4. Approximation des volumes en trop et en manque avec des tiges verticales.
L’accélération gravitationnelle au point $P$ causée par chaque tige représentant un élément de volume $V_i$ est donnée par
\[\Delta g_{z_i} = G\Delta\rho S\cdot\left(\frac{1}{\alpha_i} - \frac{1}{\beta_i}\right) ,\]où $\alpha_i = \sqrt{\Delta x_i^2 + \Delta y_i^2}$ est la distance horizontale entre $P$ et chaque tige et $\beta_i = \sqrt{\Delta x_i^2 + \Delta y_i^2 + \Delta z_i^2}$ est la distance entre $P$ et le sommet de chaque tige. Les substitutions suivantes sont utilisées :
- $\Delta x_i = x - x_i$
- $\Delta y_i = y - y_i$
- $\Delta z_i = z - z_i$.
Le choix de $\rho$ est fait d’après la densité moyenne de la roche encaissante. Le choix de $S$ est représentatif de la résolution spatiale du modèle numérique de terrain et du levé gravimétrique.
La correction de relief totale ($\Delta_R$) pour n’importe quel point $P$ est la somme des contributions des tiges individuelles, tel que
Notez que la correction de relief est positive partout parce que $\beta_i \gt \alpha_i$ partout, comme on l’a expliqué plus haut.
Références
- Nowell, D. A. G. (1999). Gravity terrain corrections—an overview. Journal of Applied Geophysics, 42(2), 117-134.